過阻尼, 欠阻尼, 臨界阻尼

過阻尼 (Overdamping), 欠阻尼 (Underdamping), 臨界阻尼 (Critically damped)
國立臺灣大學物理學系101級 林聖翔
在講這個主題之前,必須討論阻尼是什麼
阻尼(damping):
簡單地說,任何流體或系統有維持它們原有運動狀態的傾向,這是所謂的慣性。因此當一個物體在這個環境或系統中有一個相對於整個系統的速度(為了方便,之後所寫的速度的意思皆是指相對於系統的速度),這個環境、系統會傾向於施一個力去阻止它運動,這個作用的現象,我們稱之為阻尼。一般來說,阻尼的力會與物體運動的速度成正相關(不一定是正比)。
現在我們討論最簡單的例子,彈簧震盪時還受到一個阻尼,且阻尼力與物體的速度成正比:
\(\vec{F_d}=-c\vec{v}\)
,\(c\) 是某個特定常數跟當時環境的情況有關。
由於彈簧震盪時會受到一個跟它位置成正比的回復力,亦即 \(\vec{F_s}=-k\vec{x}\)
(\(x\) 是跟物體平衡位置的位移,\(k\) 則是彈簧係數),所以這兩個力量會互相牽制、共同影響彈簧的運動。上述阻尼力、回復力的數學表示式中的負號,代表力量是跟它的速度或是位移方向相反。
因此,總作用力 \(F_{total}=-k\vec{x}-c\vec{v}\)
在細部討論此運動的數學解之前,我們先做定性上的討論。
阻尼就像是一個緩衝,但不同的阻尼大小會導致不同的運動結果,其分類如下:
過阻尼:因為阻尼很大、緩衝足夠,整個系統有足夠大的能力去將能量耗散,所以在回到平衡的過程中不會衝過頭,系統不會來回振動,而是單調地、緩緩地趨於平衡位置。(系統只能緩緩地趨於平衡位置,原因是大部分的回復力都被拿去克服阻尼。)
欠阻尼:則是阻尼小、耗散慢,所以回復力把系統拉回平衡位置後還會衝過頭,來回多做幾次週期振盪,但隨時間增加,振盪的振幅會越來越小。
臨界阻尼:它阻撓運動的能力是介在上述兩種情況中間,具有防止振盪所需的最低能力。
以下則是數學的探討(需要一點微分方程的概念):
在前述振盪系統中,\(\vec{F_{total}}=-k\vec{x}-c\vec{v}\)
根據牛頓的第二定律 \(\vec{F}=m\vec{a}\)
我們可以得到 \(m\ddot{x}+c\dot{x}+kx=0\)
我們令 \(2\beta=\frac{c}{m},\omega^2_0=\frac{k}{m}\),原式變成 \(\ddot{x}+2\beta\dot{x}+\omega^2_0x=0\)
它的解:\(x(t)=e^{-\beta t}[A_1e^{(\sqrt{\beta^2-\omega^2_0})t}+A_2e^{-(\sqrt{\beta^2+\omega^2_0})t}]\)
故可分成三種阻尼的情形:
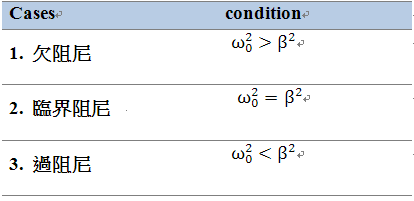 定義 \(\omega_1=\sqrt{\omega_0^2-\beta^2}\) 為阻尼振盪的角頻率(angular frequency)(要注意,這不表示阻尼振盪是一個嚴格的周期運動,我們只是從它在欠阻尼情形下,在平衡點的時間差來定義)
定義 \(\omega_1=\sqrt{\omega_0^2-\beta^2}\) 為阻尼振盪的角頻率(angular frequency)(要注意,這不表示阻尼振盪是一個嚴格的周期運動,我們只是從它在欠阻尼情形下,在平衡點的時間差來定義)
欠阻尼的解
\(x(t)=Ae^{\beta t}\cos{(\omega_1t-\delta)}\)
\(\delta\) 跟初始條件有關
臨界阻尼的解
\(x(t)=(A+Bt)e^{-\beta t}\)
過阻尼的解
\(x(t)=e^{-\beta t}[A_1e^{\omega_2 t}+A_2e^{-\omega_2 t}]\)
這裡的 \(\omega_2=-\omega_1\)。
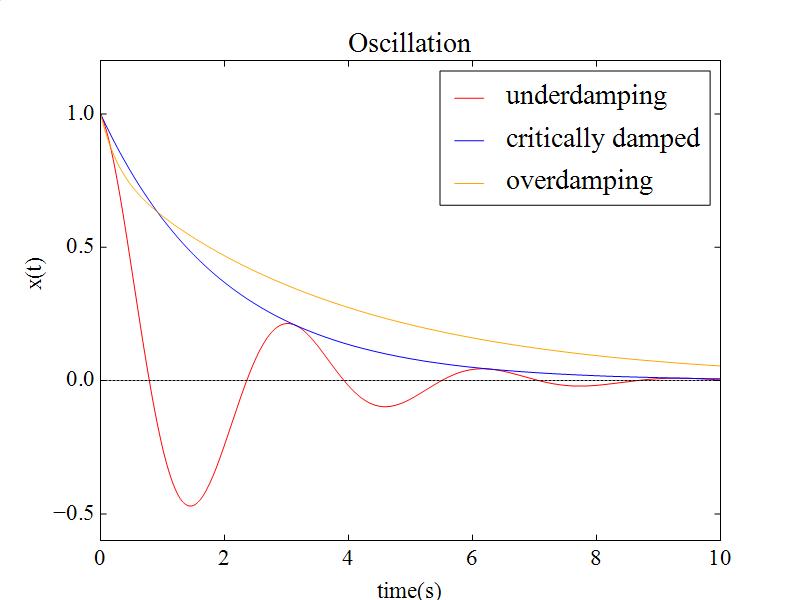
圖1: 三種阻尼震盪的運動模式可以用這張圖表示,紅色代表欠阻尼、藍色代表臨界阻尼、黃色代表過阻尼(作者繪)
從圖1我們可以看到,假設平衡位置在 \(0\),在回到平衡位置前,欠阻尼仍會做幾次振盪;臨界阻尼則會比過阻尼更早回到平衡點。
從之前討論的例子,我們可以就此作一些應用,例如在有些場合,門會有一個油壓裝置,主要是為了避免它直接撞擊造成噪音,但我們還有一個要求,希望它能儘快回到平衡位置,不然你就會看到門過很久才會闔上。從圖1 我們知道,如果使用過阻尼的方法,它必須要花比較多的時間,所以這並不是我們要的;欠阻尼則因為它還會多做幾次的振盪,無法符合我們的目的。因此在做這類的油壓系統,通常會希望它的阻尼效果盡量達到臨界阻尼。圖2中三個門的動畫說明了上述三種運動方式的差異。

圖2 (陳義裕繪)
參考文獻
- Greenspan, Martin, Damping, McGraw-Hill Encyclopedia of Science & Technology. 10th ed. Vol. 5. New York: McGraw-Hill, 2007. 235-236. Gale Virtual Reference Library. Web. 25 Jun. 2014.
- Encyclopaedia Britannica, damping. http://www.britannica.com/EBchecked/topic/150616/damping m
- 維基百科, 阻尼震盪. http://zh.wikipedia.org/wiki/%E9%98%BB%E5%B0%BC%E9%9C%87%E7%9B%AA
 前一篇文章
前一篇文章 下一篇文章
下一篇文章 【丁肇中獲頒諾貝爾物理獎40週年專題】1976年諾貝爾物理獎官方新聞稿
【丁肇中獲頒諾貝爾物理獎40週年專題】1976年諾貝爾物理獎官方新聞稿 ![[課程] VPhysics Python 於物理上之應用](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2015/07/V物理.png) [課程] VPhysics Python 於物理上之應用
[課程] VPhysics Python 於物理上之應用  斯特凡-波茲曼定律
斯特凡-波茲曼定律  臺大梁次震中心成功發射 伽瑪射線爆人造衛星望遠鏡
臺大梁次震中心成功發射 伽瑪射線爆人造衛星望遠鏡 ![[講座] 2016春季展望─天文宇宙大發現](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2016/03/lec.png) [講座] 2016春季展望─天文宇宙大發現
[講座] 2016春季展望─天文宇宙大發現 ![[影音] CASE【百秒說科學】為什麼深海生物是紅色的?](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2016/09/DeepSea-620x280-online.png) [影音] CASE【百秒說科學】為什麼深海生物是紅色的?
[影音] CASE【百秒說科學】為什麼深海生物是紅色的? ![[影音] 梶田隆章:「重力波偵測-The KAGRA project」講座](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2015/12/2015456121235745.png) [影音] 梶田隆章:「重力波偵測-The KAGRA project」講座
[影音] 梶田隆章:「重力波偵測-The KAGRA project」講座 


{kind=link}
讚!淺顯易懂!
欠阻尼要怎從 [e^(-βt)]*[A1*cos(ω1t)+A2*sin(ω1t)] 變成上述的解?
Your article is useful !