力學能(Mechanical energy)

力學能( Mechanical energy)
國立臺灣大學物理系簡嘉泓
定義
或譯為機械能,為動能與位能的總和,位能即常見之重力位能、電力位能及彈性位能等保守力造成之位能,其單位為焦耳$$(J)$$,且僅有大小而無方向,若一物體含有越多的位能則代表它能夠對其他物體做越多功(work)。
力學能守恆
力學能的定義為位能 $$U$$ 與動能 $$E_k$$ 之總和,即 $$E_{mechanical}=U+E_k$$
動能與位置無關,僅與物體之質量 $$m$$ 與速度 $$v$$ 有關,定義為 $$E_k=\displaystyle\frac{1}{2}mv^2$$
位能僅與物體在保守力場中之位置有關,從 $$\vec{x_1}$$ 移動到 $$\vec{x_2}$$ 的位能變化可表示為
$$\displaystyle \Delta U=-\int_{\vec{x_1}}^{\vec{x_2}} \vec{F}\cdot\mathrm{d}\vec{x}$$
$$\vec{F}$$ 為物體在力場中所受的力。位能為一相對量,所以必須選定一參考位置做為基準。所謂力學能守恆,是一系統若不受外力作功(即無能量進出該系統,包含其內部的化學反應),其內部的動能與位能總合會維持不變。常見系統如理想上之彈簧系統、自由落體、單擺等。
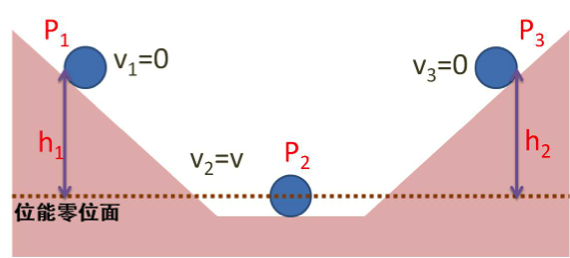
圖一
以圖一的系統來說(球在 $$P_1P_2P_3$$ 三點間來回運動,假設球不滾動,且忽略所有摩擦力):
球在 $$P_1$$ 處之狀態為 $$E_k+U=0+mgh_1$$ $$P_2$$ 處之狀態為 $$E_k+U=\displaystyle\frac{1}{2}mv^2+0$$
$$P_3$$ 處之狀態為 $$E_k+U=0+mgh_2$$
由 $$P_1$$ 到 $$P_2$$ 的過程中,系統內的位能逐漸轉換為動能;
而由 $$P_2$$ 運動到 $$P_3$$ 的過程則動能轉換為位能。
由力學能守恆可得 $$\displaystyle mgh_1=\frac{1}{2}mv^2=mgh_2$$
即 $$h_1=h_2$$,也可求出 $$v=\sqrt{2gh_1}=\sqrt{2gh_2}$$
人造衛星
 人造衛星的運行也牽涉到力學能守恆之應用
人造衛星的運行也牽涉到力學能守恆之應用
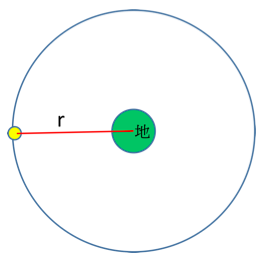
假設一人造衛星質量為 $$m$$,地球質量為 $$M$$,位於距離地心 $$r$$ 的位置,速度為 $$v$$,
此時其力學能可寫成 $$E_{mechanical}=\displaystyle U+E_k=-\frac{GMm}{r}+\frac{1}{2}mv^2$$
若人造衛星依圓形軌道運行,則可視為等速率圓周運動,
將向心力表示成:$$\displaystyle F=\frac{GMm}{r^2}=ma=m\frac{v^2}{r}$$
代入可將其簡化為 $$E_{mechanical}=\displaystyle -\frac{GMm}{r}+\frac{1}{2}m \frac{GM}{r}=-\frac{GMm}{2r}$$
且可得到 $$\displaystyle -\frac{1}{2}U=E_k$$ 的性質。
彈簧振盪
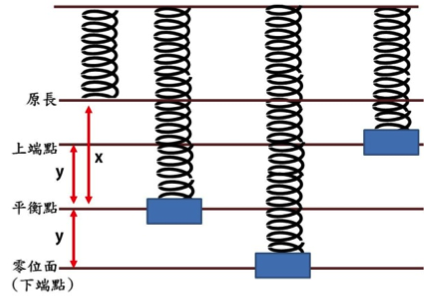
圖二
常見的彈簧振盪也能用力學能守恆解釋,假設圖二中物體質量為 $$m$$,在平衡點之速率為 $$v$$,且彈簧彈力常數為 $$k$$,其位能可分為彈力位能 $$U_s$$ 與重力位能 $$U_g$$。
若忽略其他阻力,則平衡點之力學能可表示為:$$\displaystyle U_s+U_g+E_k=\frac{1}{2}kx^2+mgy+\frac{1}{2}mv^2$$
上端點之力學能可表示為:$$\displaystyle U_s+U_g+E_k=\frac{1}{2}k(x-y)^2+mgy+0$$
下端點之力學能可表示為:$$\displaystyle U_s+U_g+E_k=\frac{1}{2}k(x+y)^2+0+0$$
除了上述幾項應用,力學能守恆也常存在於生活中:例如單擺的兩端點會趨近等高;溜滑梯的過程中位能轉變為動能而使人的速度逐漸加快等等都是例子。然而在現實情況下,可能會有摩擦力等非保守力的介入,這些非保守力對系統做功,會使得力學能轉變成其他能量形式耗散,此時便必須考慮功能原理,將非保守力的作功也計入,進而使總能量不變(即熱力學第一定律所涵蓋的能量守恆)。
 前一篇文章
前一篇文章 下一篇文章
下一篇文章![[影音] CASE【百秒說科學】為什麼深海生物是紅色的?](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2016/09/DeepSea-620x280-online.png) [影音] CASE【百秒說科學】為什麼深海生物是紅色的?
[影音] CASE【百秒說科學】為什麼深海生物是紅色的?  2015年觀星大事記
2015年觀星大事記 ![[講座] CASE電影講座:百年熒惑說分明 ─ 從「絕地救援」談太空探險](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2015/10/110600223.png) [講座] CASE電影講座:百年熒惑說分明 ─ 從「絕地救援」談太空探險
[講座] CASE電影講座:百年熒惑說分明 ─ 從「絕地救援」談太空探險  【特別報導】2013年諾貝爾獎預測(二)物理獎
【特別報導】2013年諾貝爾獎預測(二)物理獎 ![[影音] CASE【百秒說科學】《改變時空形狀的重力波》](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2016/12/Online-620x280.jpg) [影音] CASE【百秒說科學】《改變時空形狀的重力波》
[影音] CASE【百秒說科學】《改變時空形狀的重力波》 ![[講座] 星際效應,有影無?-CASE電影科普講座](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2014/12/星際效應宣傳圖-620x280.gif) [講座] 星際效應,有影無?-CASE電影科普講座
[講座] 星際效應,有影無?-CASE電影科普講座 ![[影音] CASE電影講座:星際效應,有影無?](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2014/12/2014-12-19-午12.41.44-592x350.png) [影音] CASE電影講座:星際效應,有影無?
[影音] CASE電影講座:星際效應,有影無?  哈伯太空望遠鏡
哈伯太空望遠鏡 


{kind=link}
感謝精闢的解釋
對我的學習是一大助力