橢圓的參數式

橢圓的參數式
臺北市立西松高中 蘇惠玉教師
圓的參數式
在二上的三角單元教學中,我們曾經學習過利用三角函數將直角坐標系上的點坐標,轉換成極坐標。對每一個直角坐標系統上的點 \(P(x,y)\),設它與原點的距離 \(\overline{OP}\) 為 \(r=\sqrt{x^2+y^2}\),
以 \(x\) 軸的正方向為始邊,逆時針旋轉到 \(\overrightarrow{OP}\)(\(\overrightarrow{OP}\) 為終邊)的角度為 \(\theta\),
因此 \(P\) 點的極坐標表示為 \(P[r,\theta]\)。
既然同一點的坐標有兩種表徵,那麼直角座標與極坐標之間又該如何轉換呢?此時由廣義角的三角函數值定義可知 \(\cos\theta=\frac{x}{r},\sin\theta=\frac{y}{r}\),因此可得 \(x=r\cos\theta,y=r\sin\theta\)。
亦即直角座標系統中的 \(x\) 與 \(y\) 坐標,可利用三角函數轉換成以極坐標中的 \(r\) 與 \(\theta\) 來表示。

在平面座標系統中,對於一個圓心在原點,半徑為 \(r\) 的圓而言,圓上的動點 \(P(x,y)\) 滿足方程式 \(x^2+y^2=r^2\);又它到圓心 \(O\)(原點)的距離 \(\overline{OP}=r\);以 \(x\) 軸的正方向為始邊,逆時針旋轉到 \(\overline{OP}=r\) 的角度為 \(\theta\),因此可得 \(x=r\cos\theta,y=r\sin\theta\)。
由於圓上每一點到圓心(原點)的距離皆為固定的半徑 \(r\),
因此得以僅用一個參數 \(\theta\) 來表示圓上的動點 \(P\):\(\left\{ \begin{array}{l} x = r\cos \theta \\ y = r\sin \theta \end{array} \right., 0 \le \theta < 2\pi \)

藉由指定參數 \(\theta\) 的範圍,可以用來表示圓的圖形的一部分,
例如以 \(\left\{ \begin{array}{l} x = r\cos \theta \\ y = r\sin \theta \end{array} \right., 0 \le \theta \le \pi\) 來表示一圓心在 \((0,0)\),半徑為 \(r\) 的圓的上半部。
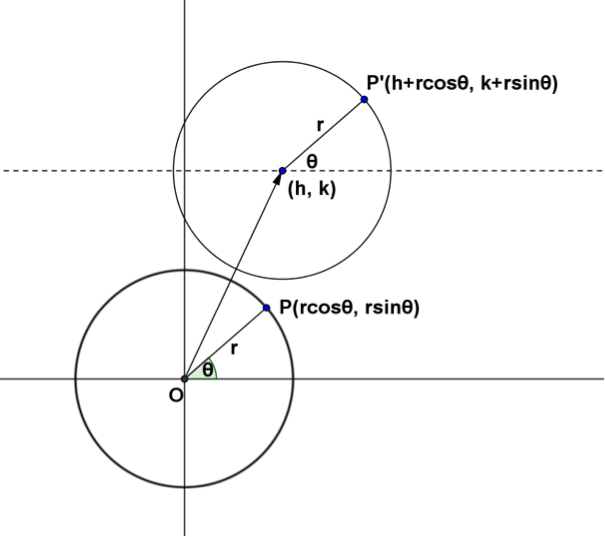
接下來,當圓的圓心不在原點 \((0,0)\),而在點 \((h,k)\) 時,僅需要考慮平移即可。
將圓心在 \((0,0)\) 的圓上的每一點沿著向量 \(\vec{v}=(h,k)\) 的方向平移一個向量 \(\vec{v}\) 的長度,
因此可得一圓心在 \((h,k)\) 的圓 \((x-h)^2+(y-k)^2=r^2\),
這個圓上動點的參數式為:\(\left\{ \begin{array}{l} x = h + r\cos \theta \\ y = k + r\sin \theta \end{array} \right.,{\rm{ }}0 \le \theta < 2\pi\)
橢圓的參數式
然而對橢圓而言,卻不能以同樣的方法定義參數式。因為橢圓上的點,到中心的距離是變動的,隨動點的位置而變。因此對中心在原點 \((0,0)\) 的橢圓上的動點 \(P(x,y)\) 而言,若依極坐標的方式定義參數式,得到的 \(x=\overline{OP}\cos\theta,y=\overline{OP}\sin\theta\)(如下圖),將無法僅以一個參數表示橢圓上的動點。那麼我們該如何定橢圓的參數式呢?重點就在於如何決定 \(\theta\)!

我們先以中心在原點的橢圓來討論,其標準式為 \(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\),其中 \(a>0,b>0\)。
從代數的表徵意義來看,由 \(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\) 聯想到 \(\cos^2\theta+\sin^2\theta=1\),
所以可設 \(\frac{x}{a}=\cos\theta,\frac{y}{b}=\sin\theta\),
即可得此橢圓的參數式為 \(\left\{ \begin{array}{l} x = a\cos \theta \\ y = b\sin \theta \end{array} \right.,0 \le \theta < 2\pi\)。
但是 \(\theta\) 在哪裡呢?這就要從幾何意義來說明了。
若將此橢圓作伸縮變換,以橢圓中心為伸縮中心,\(x\) 方向伸縮 \(\frac{1}{a}\) 倍,\(y\) 方向伸縮 \(\frac{1}{b}\) 倍,
亦即將橢圓上的動點 \(P(x,y)\) 作此伸縮變換為 \(P'(x’,y’)\),其中 \(x’=\frac{x}{a},y’=\frac{y}{b}\)。
此時將橢圓變換為一圓心在原點,半徑為1的圓,此圓的方程式為 \(x’^2+y’^2=1\)。
若以 \(x\) 軸的正方向為始邊,逆時針旋轉到 \(\overline{OP’}\) 的角度為 \(\theta\),可得 \(x’=\cos\theta,y’=\sin\theta\)。
因為 \(x’=\frac{x}{a},y’=\frac{y}{b}\),
所以橢圓上動點 \(P(x,y)\) 中的 \(x=a\cos\theta,y=b\sin\theta\) (如下圖左)。


此時的 \(\theta\),也可以這樣考慮,如上右圖:在橢圓的內部作一半徑為 \(b\) 的圓,外部作一半徑為 \(a\) 的圓,過橢圓上動點 \(P(x,y)\) 作一水平線與一鉛直線,與這兩個圓分別交於 \(A\) 點與 \(B\) 點。
先假設 \(A,B\) 都在第一象限,
此時 \(A\) 點坐標為 \(A(\sqrt{b^2-y^2},y)\),\(B\) 點坐標為 \(B(x,\sqrt{a^2-x^2})\),
因此 \(\overline{OA}\) 的斜率 \(m_{OA}=\frac{y}{\sqrt{b^2-y^2}}\),\(\overline{OB}\) 的斜率 \(m_{OB}=\frac{\sqrt{a^2-x^2}}{x}\),
考慮平方相減,\(\frac{{{y^2}}}{{{b^2} – {y^2}}} – \frac{{{a^2} – {x^2}}}{{{x^2}}} = \frac{{{x^2}{y^2} – ({a^2} – {x^2})({b^2} – {y^2})}}{{{x^2}({b^2} – {y^2})}} = \frac{{{x^2}{y^2} – ({a^2}{b^2} – {b^2}{x^2} – {a^2}{y^2} + {x^2}{y^2})}}{{{x^2}({b^2} – {y^2})}} = 0\)
(因為 \(x,y\) 滿足 \(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\))
亦即 \(m_{OA}=m_{OB}\),當 \(A,B\) 在其他象限時亦同理。因此可知此時原點 \(O\) 與 \(A,B\) 三點共線。
若以 \(x\) 軸的正方向為始邊,逆時針旋轉到 \(\overleftrightarrow{AB}\) 的角度為 \(\theta\),
此時 \(A\) 點坐標為 \(A(b\cos\theta,b\sin\theta)\),\(B\) 點坐標為 \(B(a\cos\theta,a\sin\theta)\),
故可得 \(P(a\cos\theta,b\sin\theta)\)。也就是說,橢圓 \(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\)的參數式為
\(\left\{ \begin{array}{l} x = a\cos \theta \\ y = b\sin \theta \end{array} \right.,0 \le \theta < 2\pi\)
當橢圓的中心不在原點 \((0,0)\),而在點 \((h,k)\) 時,此時僅需要考慮平移即可。
將中心在原點 \((0,0)\) 的這個橢圓上的每一點沿著向量 \(\vec{v}=(h,k)\) 的方向平移一個向量 \(\vec{v}\) 的長度,因此可得中心在 \((h,k)\) 的橢圓為 \(\frac{{{{(x – h)}^2}}}{{{a^2}}} + \frac{{{{(y – k)}^2}}}{{{b^2}}} = 1\)。
這個橢圓上動點的參數式即為:\(\left\{ \begin{array}{l} x = h + a\cos \theta \\ y = k + b\sin \theta \end{array} \right.,{\rm{ }}0 \le \theta < 2\pi\)。
 前一篇文章
前一篇文章 下一篇文章
下一篇文章 惠更斯 (Christiaan Huygens) 專題
惠更斯 (Christiaan Huygens) 專題  海芭夏 (Hypatia of Alexandria)
海芭夏 (Hypatia of Alexandria)  泰勒多項式(2) (Taylor Polynomials(2))
泰勒多項式(2) (Taylor Polynomials(2)) 


有例題嗎???