慣性座標系(Inertial reference frame, also Inertial frame of reference)

慣性座標系(Inertial reference frame, also Inertial frame of reference)
國立臺灣大學物理所黃一玄
描述一個物體的運動,必須要引入某個參考座標系,而使用不同的參考座標系,物體運動的狀態與於其中適用的物理定律都會因此改變。不同的參考座標系可能可以把簡單的運動描述得複雜,因此,人們自然會想找出能描述物體運動與適合的座標系,使得物理定律處於最簡單形式。
隨意選取一個參考座標系,空間很可能非同質(inhomogeneous)也非等向性(anisotropic),意思是於其中的物理運動,不同位置點的力學性質不對等;同理,時間的非均質性也會導致不同時間點下遵循不相同的物理定律。例如一個物體可能上一個時間點是靜止,下一個時間點就開始移動而不需要外力。時空的同質性是很重要的,因為它保證在不同時空點下,物體會因遵循相同物理定律,使得實驗結果可重複驗證。而對於那些在空間以及時間上都具有同質性的座標系就叫做慣性座標系。在這樣的座標系下,物體運動會遵循牛頓力學的假設。而愛因斯坦則更進一步將此概念推廣,認為所有物理定律(而非僅牛頓力學) 在所有慣性座標系下都是相同的。
所有慣性座標系都是對等的,且彼此之間都保持恆定的直線運動。在牛頓力學中,不同的慣性座標系之間可以經由伽利略變換(Galilean Transformation)來轉換,而在狹義相對論中,則可經由勞侖茲變換(Lorentz Transformation)轉換。具體一點說,慣性座標系間的對等關係代表任何人在某一慣性座標系中,以均勻速度前進,將無法用任何實驗方式判斷其絕對速度,因此排除了牛頓的絕對空間假設,沒有哪一個慣性座標系是絕對標準。
由於物理定律在所有的慣性座標系下都具有相同形式,因此,慣性座標系可以定義成:可使物理定律處在最簡單形式下的座標系。
例如在一慣性座標系下,對於一在空間中運動的物體而言,牛頓第二運動定律F=Ma,其中M為物體質量,a為物體加速度,F為物體所受的力。但在非慣性座標系下,同一物體受力關係就複雜許多,若堅持要讓牛頓第二運動定律保持同樣形式,則須寫成F’=Ma,其中F’需要加入假想力做修正,例如在旋轉座標系中得加入離心力(Centrifugal force)和科氏力(Coriolis force)。
事實上,分別慣性座標系跟非慣性座標系的條件就是描述物體運動的時候是否需要加入假想力。「在非慣性座標系下的運動方程式與慣性座標系下的運動方程式差在一個額外的項,叫做慣性力(inertial force)(又稱假想力fictitious force)。這讓我們能夠用實驗偵測某一系統的非慣性特性。」—V. I. Arnol’d: Mathematical Methods of Classical Mechanics Second Edition, p. 129 (“The equations of motion in a non-inertial system differ from the equations in an inertial system by additional terms called inertial forces. This allows us to detect experimentally the non-inertial nature of a system.”)
在實務上,常將遠方固定星體當作參考的慣性座標系,雖然這些星體實際上是非慣性座標系,但與慣性座標系的假設在許多狀況下誤差小到可忽略。
參考資料:
1. L D Landau (Author), E.M. Lifshitz, Mechanics, Butterworth-Heinemann (1976)
2. http://en.wikipedia.org/wiki/Inertial_frame_of_reference
 前一篇文章
前一篇文章 下一篇文章
下一篇文章![[講義] 科學史沙龍:陳竹亭教授、楊信男教授](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2015/01/科學史.png) [講義] 科學史沙龍:陳竹亭教授、楊信男教授
[講義] 科學史沙龍:陳竹亭教授、楊信男教授 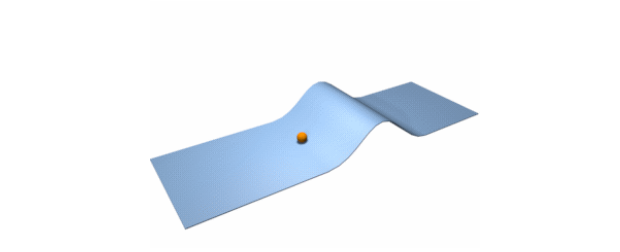 穿隧(通過勢壘)
穿隧(通過勢壘)  馬克士威-波茲曼分布
馬克士威-波茲曼分布  【2014諾貝爾物理獎特別報導】藍光─把嶄新的光明帶到世界的角落
【2014諾貝爾物理獎特別報導】藍光─把嶄新的光明帶到世界的角落  玻色-愛因斯坦分布
玻色-愛因斯坦分布 ![[影音] 丁肇中諾貝爾物理獎40周年大師演講](https://highscope.ch.ntu.edu.tw/wordpress/wp-content/uploads/2016/06/banner-online.jpg) [影音] 丁肇中諾貝爾物理獎40周年大師演講
[影音] 丁肇中諾貝爾物理獎40周年大師演講  【2014諾貝爾物理獎】照亮世界的嶄新光芒
【2014諾貝爾物理獎】照亮世界的嶄新光芒  目前世界上最精準的時鐘-光晶格光頻原子鐘在低溫環境下的突破
目前世界上最精準的時鐘-光晶格光頻原子鐘在低溫環境下的突破 

